GPS stands for Global Positioning System. DGPS stands for Differential Global Positioning. GPS and DGPS are used for satellite-based navigation systems. The primary difference between GPS and DGPS is that GPS has a worldwide coverage area for its equipment, yet, the DGPS’s instruments range is local.
GPS
GPS (Global Positioning System) offers the accurate position of an object to the earth. GPS makes use of timely messages produced by satellites revolving around the earth. A constellation of 24 satellites and additional ones for backup is part of the GPS system. Trilateration, a method for obtaining a precise location, uses four satellites.
GPS technology uses a standalone receiver, where the location is calculated directly. Uncorrected satellite clock errors, orbital parameter satellite errors,
Uncorrected satellite clock errors, orbital parameter satellite errors, ionospheric and tropospheric delays, multipath errors, geometric errors, and datum selection mistakes are some of the flaws that might occur while using this method. New technologies have been developed to minimise these errors. GPS has a theoretical accuracy range of 10 to 15 metres.
Five Key Uses of GPS
- Location: – It is capable of determining a position.
- Timing: – Making accurate time measurements possible.
- Mapping: –Creating maps of the world.
- Navigation: – Getting from one location to another on the earth’s surface.
DGPS
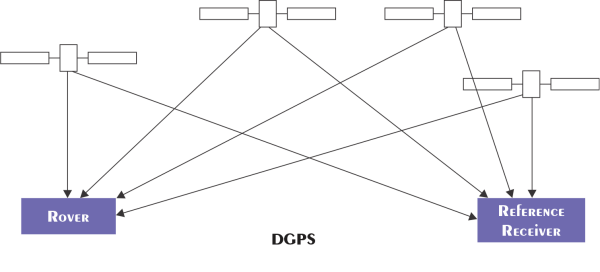
DGPS stands for Differential Global Positioning System. It is an enhancement to GPS. The accuracy of DGPS technology is up to10 cm. Accuracy is increased as a result of reducing or eliminating signal deterioration. Differential GPS locates a location in relation to a fixed reference point rather than trying to find it directly. The rover and reference receivers are necessary for DGPS; the rover serves as the user, and the reference receiver is also referred to as the stationary receiver.
A stationary receiver is fixed, and the system is aware of its location. The rover and the base station tower are continuously receiving satellite information. The precise timing is determined by the base station tower using its known position. In order to correct the measurements using the relative position of the stationary receiver, the information is transmitted from the stationary receiver to the rover receiver.
Difference Between GPS and DGPS
| Basis for Comparision | GPS | DGPS |
|---|---|---|
| Number of receivers used | There is only one standalone GPS receiver. | Two, Rover and stationary receivers. |
| Cost | GPS is less expensive compared to DGPS. | DGPS is more expensive than GPS. |
| Time Coordinate system used | WGS84 | Local coordinate system. |
| Frequency range | 1.1-1.5 GHz | Varies according to the agency. |
| Range of the instruments | Global | Local (within 100 km) |
| Accuracy | 15-10m | 10cm |
| Factors Affecting the Accuracy | Ionosphere, troposphere, multipath, selective availability, atmospheric conditions, and satellite timing are some of the factors that affect the accuracy. | Distance between the transmitter and rover, ionosphere, troposphere and multipath are some of the factors that affect the accuracy. |
Key Differences Between GPS and DGPS
- In GPS, there is a solo receiver in GPS which receives signals from the satellite, but in DGPS, we have two receivers, the reference receiver and the rover (user)- where rover obtains a calibrated signal from the reference receiver (fixed base station).
- GPS system has an accuracy of about 15 metres. The accuracy of DGPS, on other hand, can be as high as 10 cm.
- The cost of a GPS system is lower than a DGPS system.
- The GPS uses the WGS84 time coordinate system, and it is a geodetic datum that is fixed to the earth and is centred on the planet. DGPS uses the local coordinate system.
- Selective availability, satellite timing, atmospheric conditions, ionosphere, troposphere, and multipath are elements that affect the GPS system’s accuracy. In contrast, the DGPS system is only slightly impacted by factors like multipath, ionosphere, troposphere, and the distance between the transmitter and rover.

